Table of Contents
What You’ll Learn
Introduction to Python and the Tree Data Structure
Motion Planning Basics
Calculate a path using The Rapidly Exploring Random Trees (RRT) algorithm
Calculate a path using The RRT Star and Informed RRT Star algorithms
About Course
Introduction
Introduction and Course Outline
Setting up Python and Downloading the Git Repo
Brief overview of installing Python and the assignments for this course
Data Structures: Introduction to Trees
Introduction to the Tree Data structure
Assignment 0
Assignment 0: Introduction to Python and Tree Data Structure
RRT Algorithm Explanation
Intro to Rapidly Exploring Random Trees
- Conclusion
- Announcement: New Course (Nonholonomic Motion Planning)
- Announcement: New Course (Flight Simulation and Control)
Description
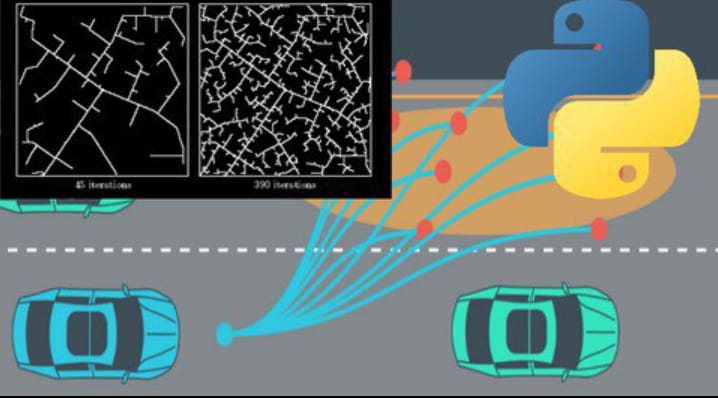
Motion planning or path planning is an engineering field that deals with developing computational algorithms to calculate a path or a trajectory for a robot or any other autonomous vehicle. In this course, you will learn the well-known Rapidly Exploring Random Trees (RRT) and RRT* algorithms. These are sampling-based algorithms unlike search-based algorithms (A*), and are used to plan a path from a start to an end location whilst avoiding obstacles. You will be implementing these algorithms in Python. If you do not have any background in programming that is okay as I will teach everything from scratch. There will be 3 interactive assignments in which you will get to test your algorithms. By the end of this course, you will have a fundamental understanding of RRT-based algorithms. The objective of these algorithms is to generate a path consisting of waypoints from a start to an end location. It will be required to have Python 3.7 along with Numpy and Matplotlib installed to complete the assignments in this course. I will briefly go over installing Python as well, however, numerous resources cover the details of setting up Python on your computer. Be sure to leave a rating when you finish. I look forward to seeing you in this course!
This Course is for:
Anyone with an interest in programming, robotics and autonomous vehicles